プログラミング「的思考」を学ぶために、クマの「グマミン」が様々なゲームに挑戦する「プログマミング」企画。
第1回はこちらをご覧ください。

前回は、ロボットに攻撃だけでなく、その時の状況に応じて敵からいったん離れたり、回復したらまた近づいて攻撃したり、、、などの判断をさせていきました。
今回は実際に、ロボットへの命令に必要な「ノード」を作っていきましょう!

1から命令するのは大変!

まずはお決まりのバトルアリーナ画面。
当然これではただじっとたたずんでいるだけです。
いつものように、「行動同士をつなぎたい」のですが、それが一切ありません。
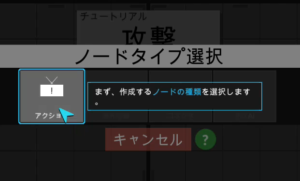
ここでは、「行動自体の作り方」を学んでいきます。
ノード=命令はまず「アクション」や「条件判断」などの大まかなタイプを選び、そこから細かく分岐させていきます。
今回は「アクション」を選択。
アクションタイプは「攻撃」。(今後、いろいろと選べるようになります。)
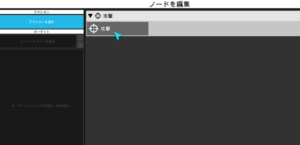
攻撃を選んだら、対象を「敵機」に。

ここから少しややこしく感じてしまったのですが、ターゲットのフィルタを選択します。
「短距離」や「射程外」の敵をターゲットにしたり、「×」ボタンを押すことでターゲットから除外することもできます。
ここではためしに、
「短距離または中距離または射程外でない」という設定に。

こうすると、近くの敵に攻撃をしてくれる、、、はず。

これでいつものように命令をつなげることができました。
実際にバトルをスタートさせると、、、
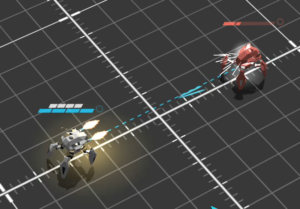
このように、「誰に何をするのか」そして「その対象はどの距離にいるのか」などを細かく設定することができます。
もちろんさきほどの命令は、必ずしも最適な答えではなかったかもしれません。
「射程外ではない」という命令だけでも、攻撃が実行されていたかもしれませんよね?
こんなことをあれこれ考えながらプレイできるのがこのゲームの面白さなんだと思います。
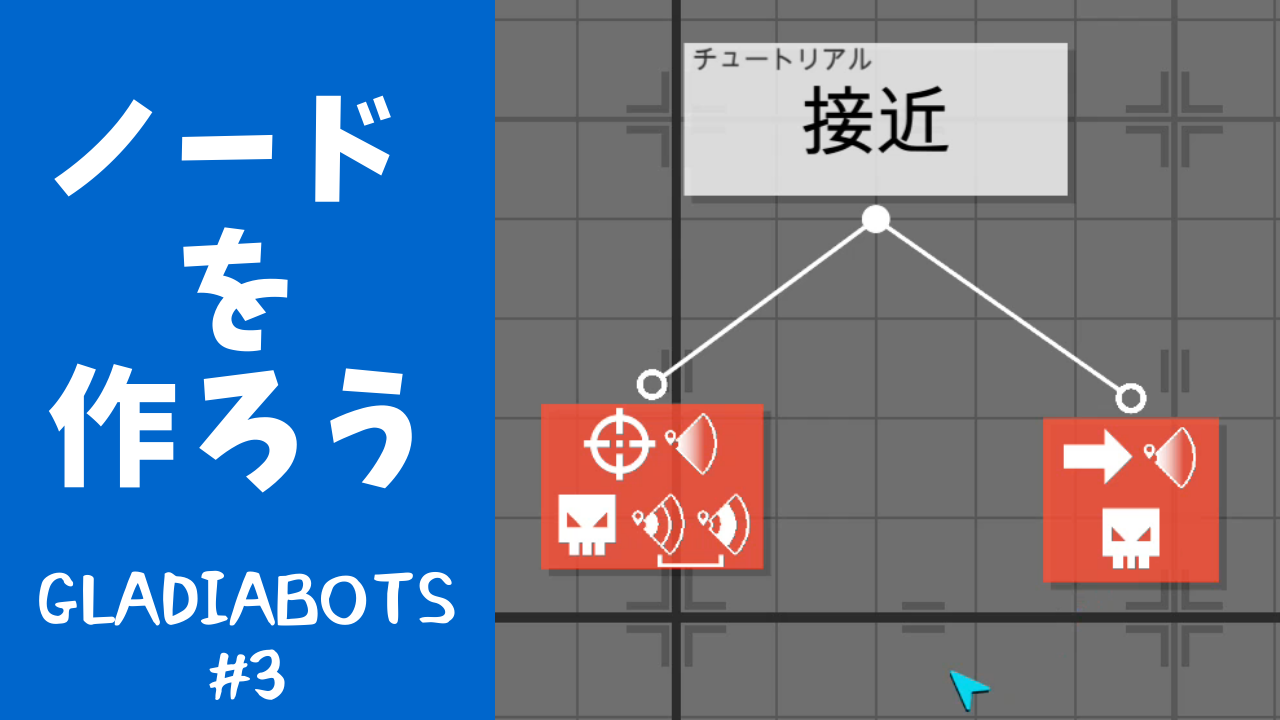
接近アクションを作ろう

さてもう1題です。
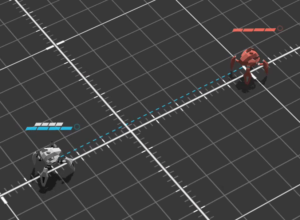
やや距離の離れたところにいる敵機。
こういうときは、、、
さっそく命令をしてみましょう。
現状は「最も近い敵機(短距離または中距離)に攻撃する」となっていますが、長距離の敵には攻撃できません。
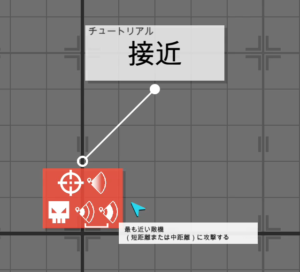
そこで、新たなアクション「接近」を追加。
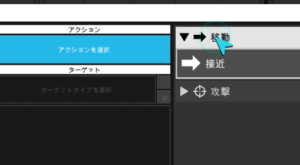
「移動アクション」の接近を選び、もちろんターゲットは「敵機」。
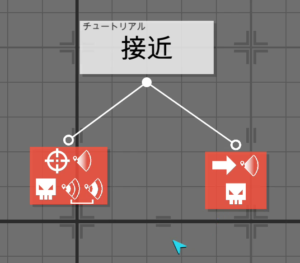
これで、「最も近い敵機に接近する」という命令が追加できました。
ここで注意しなければならないのが「命令の配置」です。
左側の命令を優先してしまうので、
「攻撃」>「接近」という優先順位での配置に。
ここの説明は第2回をご覧ください。

これでバトルをすると、まずは敵機に近付き、、、
射程圏内に入ると攻撃開始!
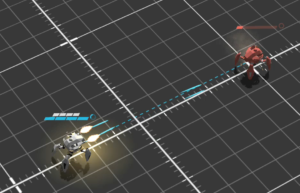
無事に敵を倒すことができました。
いかがでしたか?
今回は、実際に1から命令(ノード)を作成し、組み合わせるところまでやってみました。
次回からはついに「条件判断」を自分で作成してみたいと思います!
ではまた!